Automatisierung im Airbus
Inhaltsübersicht
Der Airbus als Vorreiter der Automatisierung
40 Jahre nach dem Erstflug des Airbus A320, der eine neue Ära in der Zivilluftfahrt einleitete, stellt sich die Frage, wie sich die Automatisierung bis heute entwickelt hat und ob sie den Piloten das Leben tatsächlich erleichtert. Seit der Einführung der Airbus A320 Familie als erster ziviler Flugzeugtyp mit elektronischer Steuerung und weitreichenden Schutzmechanismen hat sich einiges getan. Airbus entwickelt seine Computersysteme weiter und auch andere Hersteller treiben die Automatisierung voran.[1]
Im Folgenden sind die wesentlichen Funktionsweisen der Airbussysteme erklärt. Und es sind die Punkte beschrieben, in denen sie sich im Automatisierungsgrad von Konkurrenzflugzeugen unterscheiden. Außerdem lernen Sie einige Vor- und Nachteile dieser Art von Philosophie kennen. Und zum Ende ist ein Zwischenfall beleuchtet, der in seiner Ursache auf Fehlverhalten der Automatik zurückzuführen ist.
Die Airbus A320 Serie, die sich im Prinzip aus vier Flugzeugen zusammensetzt, welche sich im Wesentlichen nur durch eine unterschiedliche Rumpflänge und damit Kapazität unterscheiden, dienen hier als Beispiel. Dabei sind die Steuereinheiten jedoch bei allen modernen Airbus-Flugzeugen in ihrem Layout und den Grundfunktionen weitgehend gleich.[2] Deshalb lässt sich alles im Folgenden Beschriebene auch auf andere Modelle, die seit dem Airbus A320 entstanden, beziehen.
Apekte der Automatisierung im Airbus
Fly-by-Wire
Ein grundsätzliches Unterscheidungsmerkmal der modernen Airbus-Flotte seit Einführung der A320 Familie ist die Verwendung von Fly-by-Wire. Wie der Name nahelegt, handelt es sich hierbei um ein System, welches die Steuerung des Flugzeugs über elektrische Signale vornimmt und nicht wie bis dahin üblich über mechanische Verbindungen zwischen Eingabeeinheit und Steuerflächen. Airbus war hier das erste Unternehmen, welches diese Technologie in die Zivilluftfahrt brachte und verbaut sie seitdem auch in allen neuentwickelten Flugzeugen.[3] Dabei unterscheidet sich ein Airbus schon auf den ersten Blick von seinen Mitbewerbern wie Boeing oder Embraer, indem er statt über ein Steuerhorn, welches mittig zwischen den Beinen der Piloten platziert ist, über einen Sidestick verfügt. Dieser ist im Wesentlichen ein Joystick, der jeweils außen, seitlich der Piloten verbaut ist und wie sein konventionelles Gegenstück neben der Steuerung des Flugzeugs über Knöpfe auch andere Funktionen übernimmt.
Die größten Unterschiede zeigen sich jedoch im Hintergrund und liegen darin, wie ein Airbus gesteuert wird. Im Gegensatz zu Konkurrenzmodellen findet im Airbus die Steuerung im Normalfall ausschließlich über das Senden von elektrischen Signalen statt. Diese werden nicht direkt an die Steuerflächen gesendet, sondern vorher von verschiedenen Computern auf ihre Sinnhaftigkeit überprüft und ggf. angepasst weitergeleitet oder sogar übersteuert. Dies wird dadurch möglich, dass die Computer auf Flugdaten wie Geschwindigkeit und Fluglage zugreifen können und so entscheiden, ob in der aktuellen Situation eine Piloteneingabe zugelassen werden darf – diese Systeme sollen gewährleisten, dass sich das Flugzeug stets innerhalb seiner Zulassungsgrenzen bewegt.[4]
Autotrim
Ein wesentlicher Unterschied in der Bedienung des Airbus im Vergleich zu anderen Flugzeugtypen stellt die sogenannte Autotrim-Funktion dar. Möglich gemacht wurde diese erst durch die Einführung von Fly-by-Wire und dem damit verbundenen Zwischenschalten von Computer in die Steuerung des Flugzeugs.
„Ein Flugzeug befindet sich im ausgetrimmten Zustand, wenn es Höhe wie Geschwindigkeit halten kann, auch wenn der Pilot keine Kraft auf den Steuerungsmechanismus ausübt.“[5]
Erreicht wird dies bei Verkehrsflugzeugen meist dadurch, dass das gesamte Höhenleitwerk seinen Winkel verändern kann und Piloten somit aus einer angepassten Neutralstellung heraus mit dem Höhenruder, Bewegungen um die Querachse steuern. Bei konventionellen Flugzeugen findet dies über eine manuelle Eingabemöglichkeit im Cockpit meist direkt am Steuerhorn statt. Für den Piloten bedeutet dies, besonders im Anflug bei ständig wechselnden Geschwindigkeiten, dass er stetig nachtrimmen muss, um das Flugzeug auf seiner Flugbahn und den notwendigen Steuerdruck möglichst gering zu halten.[6]
Im Airbus ist es möglich, durch das entsprechende Programmieren der zwischengeschalteten Computer dem Piloten diese Arbeit abzunehmen. So werden z.B. Nickmomente durch das Ändern der Triebwerksleistung weitgehend kompensiert. Auch das Setzen der Landeklappen, welches bei konventionellen Flugzeugen zu einem Moment um die Querachse führt, wird von der Autotrim-Funktion ausgeglichen.[7] Lediglich nach dem Ausfall bestimmter Systeme oder Steuerungscomputer ist diese Funktion nicht mehr verfügbar. Dann müssen die Piloten Änderungen der Trimmung manuell über das neben den Schubhebeln platzierte Trimmrad vornehmen. Dies gilt auch für den Fall eines Triebwerkausfalls, für den beim manuellen Flug die Seitenrudertrimmung per Hand bedient werden muss. Denn so lässt sich das Drehmoment, verursacht durch asymmetrischen Schub, kompensieren.[8]
Verhalten des Airbus in Grenzzuständen
Niedriggeschwindigkeit
Sollte ein Airbus in einen Bereich kommen, in dem die Geschwindigkeit zu niedrig ist, für den aktuellen Flugzustand oder die Klappenstellung, so greifen automatisch verschiedene Mechanismen, um einen Strömungsabriss abzuwenden.
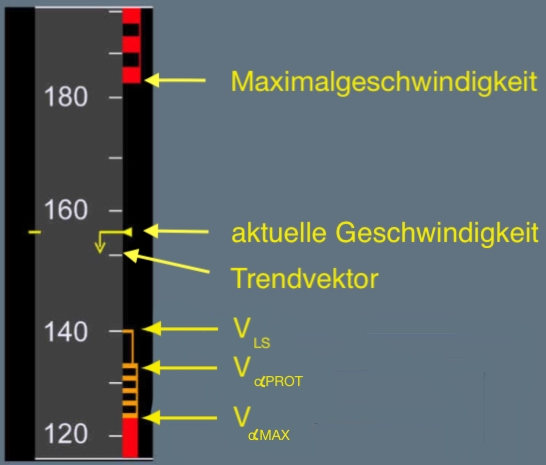
Abb.: 1 Geschwindigkeitsanzeige mit Grenzbereichen, Quelle: Airbus 320 FCOM mit eigener Beschriftung
In Abb. 1 lässt sich auf der rechten Seite die Darstellung der Geschwindigkeit erkennen, so wie sie auch die Piloten vorfinden. Im unteren Bereich werden drei limitierende Geschwindigkeiten dargestellt, die entsprechend des Flugzugstandes und Gewichtes berechnet werden und stark variieren können.
Abnehmende Geschwindigkeit
Bei abnehmender Geschwindigkeit wird zuerst die sogenannt vLS erreicht. Diese steht für die niedrigste Geschwindigkeit, die im normalen Flug ausgewählt werden und somit nicht unterschritten werden darf. [9]
vaprot steht für die Geschwindigkeit, ab der das Flugzeug einen gewissen Anstellwinkel a erreicht und ein Schutzmechanismus aktiv wird. „Anstellwinkel steht für den Winkel zwischen Tragflächenmittellinie und Vektor, der sie umströmenden Luft“.[10] Er ist ein Indikator für den aerodynamischen Zustand eines Flugzeugs. Wird dieser Winkel zu groß, so kann der Luftstrom der Flügeloberfläche nicht mehr folgen und verwirbelt. Passiert das, so spricht man von einem Strömungsabriss. Dies ist ein Zustand, in dem der Auftrieb praktisch komplett zusammenbricht und der, sofern nicht korrigiert, zum Absturz des Flugzeuges führt. Der maximal zu fliegende Anstellwinkel wird als aMAX bezeichnet und mit einer durchgängigen roten Line entsprechend dargestellt.[11]
Erreicht das Flugzeug den orange-schwarz gestrichelten Bereich, so aktiviert sich ein Modus, der sofern die Piloten keine Steuereingaben tätigen, die Geschwindigkeit bei vaprot hält. Dies wird dadurch erreicht, dass die Nase soweit gesenkt wird, dass diese Geschwindigkeit nicht unterschritten wird. Sollten die Piloten nun aus unterschiedlichen Gründen entgegensteuern und die Geschwindigkeit weiter abnehmen lassen, so wird vaMAX erreicht. Diese Geschwindigkeit kann nicht unterschritten werden. Zwischen vaprot und vaMAX wird der Airbus automatisch die gleiche Leistung geben, wie es bei einem Durchstartmanöver der Fall wäre und jegliche nach oben gerichtete Steuereingaben der Piloten blockieren. Diese Funktion nennt sich afloor und ist im Grunde ein automatisierter Schutz des Flugzeugs davor, einen zu hohen und damit kritischen Anstellwinkel zu erreichen.
Ist das Flugzeug wieder in einem normalen Geschwindigkeitsbereich, so erhalten die Piloten wieder volle Kontrolle über die Steuerflächen und können durch das Ausschalten der automatischen Leistungskontrolle auch den Schub wieder manuell reduzieren.[12]

Abb.: 2 Geschwindigkeitsanzeige, Schutzfunktion mit und ohne Eingreifen, Quelle: Airbus 320 FCOM
Hochgeschwindigkeit
Sollte das Flugzeug willentlich oder auf Grund von Turbulenzen in einen Bereich zu hoher Geschwindigkeit kommen, so greift auch hier ein Schutzmechanismus. Für die Piloten ist die zu fliegende Höchstgeschwindigkeit mit einer unterbrochenen roten Linie, dem sogenannten Barber Pole gekennzeichnet.
Die Geschwindigkeit, ab der die Systeme eingreifen, wird mit zwei grünen Strichen dargestellt und liegt auf Abb. 2 bei etwa 335 Knoten oder 620 km/h. Ist diese Geschwindigkeit erreicht, so würde das Flugzeug ohne Steuereingaben der Piloten die Nase soweit anheben, dass sich die Geschwindigkeit auf das Maximum absenkt und sich auf diesem Wert stabilisiert. Sollten die Piloten die Nase jedoch weiter senken, so erhöht sich die Geschwindigkeit bis zu einem Punkt, ab dem die Piloten in ihren Steuerungsmöglichkeiten nach unten schrittweise eingeschränkt werden. Ab einer bestimmten Geschwindigkeit lässt sich die Nase nicht weiter senken, bis sich der Wert wieder auf das Maximum reduziert hat.[13] Durch diese Handhabung ist es den Piloten möglich, kurzzeitig, z.B. bei einem Ausweichmanöver, die aktuelle Maximalgeschwindigkeit zu überschreiten. Ein langanhaltendes Fliegen im kritischen Bereich ist allerdings unmöglich.
Vor- und Nachteile der Automatisierung
Vorteile der Automatisierung
Schon im normalen Flugbetrieb werden die Vorzüge automatisierter Systeme spürbar. Insbesondere das Autotrim-System erleichtert hier den Piloten die Arbeit enorm. Das Flugzeug ist im Endanflug zum Flughafen stets ausgetrimmt, und der fliegende Pilot kann sich somit voll auf das Einhalten aller Parameter konzentrieren und hat mehr Kapazitäten zur Verfügung, sollten einmal Korrekturen nötig sein. Dies zeigt sich besonders bei komplexeren Anflugverfahren, bei denen die Piloten ohne exakte Hilfsmittel den korrekten Weg zur Landebahn finden müssen. Wenn keine Systeme zur Verfügung stehen, die den genauen Flugweg auf lateraler und vertikaler Ebene anzeigen, müssen Piloten den Anflug nach Sicht einteilen. Hierbei liegt ein Großteil der Aufmerksamkeit der Flugzeugführer auf der Umgebung und damit außerhalb des Flugzeugs, da ist es eine enorme Hilfe ist, wenn das Flugzeug nach jeder Steuereingabe sofort ausgetrimmt ist und man nicht erst noch Manipulationen vornehmen muss.
Die wichtigste Rolle kommt den automatisierten Systemen jedoch zu, wenn sich das Flugzeug in Grenzbereichen bewegt, sei dies unbewusst durch die Piloten oder durch äußere Umstände herbeigeführt. In solchen Situationen kann es passieren, dass beide Piloten absorbiert sind von einer Aufgabe und somit nicht in der Lage sind, eine kritische Situation zu erkennen und abzuwenden. Bei solchen Vorfällen wirken eine Vielzahl an visuellen wie akustischen Einflüssen auf die Piloten ein. Um in solchen Phasen hoher Belastung das Flugzeug in seinen aerodynamischen Grenzen zu halten, bis die Piloten sich einen Überblick über die Situation verschafft haben, wurden diese automatischen Schutzmechanismen entwickelt. [14]
Nachteile der Automatisierung
So sehr man die Automatisierung loben kann und sie das Leben der Crews erleichtert, ist sie dennoch nur ein Produkt von Berechnungen, die wiederum anhängig sind von den Daten, auf denen sie basieren. Hier tritt der größte Nachteil der Systeme zutage, dass egal wie gut die Programmierung sein mag, sobald die abgenommenen Werte unzuverlässig sind, auch das Ergebnis nicht zufriedenstellend sein kann. Dadurch kam es vor, dass technisch einwandfreie Flugzeuge in unkritischen Flugzuständen durch die Schutzmechanismen in Grenzbereiche gebracht wurden und bei verzögertem oder falschem Eingreifen der Crew sogar zum Absturz kamen. All dies nur durch einen Fehler in der Sensorik und damit in den Daten, die den Computern zur Berechnung ihrer Steuereingaben zu Grunde lagen!
In diesen Situationen waren die Crews oft überrumpelt, da sich solche Fehlverhalten, wenn nur in kleinen Details ankündigen, die sich nicht über die Länge eines ganzen Fluges überwachen lassen. Liefern die Sensoren falsche Daten, so strömen widersprüchliche Informationen auf die Piloten ein. Und einem Crewmitglied wird u.U. eine komplett andere Geschwindigkeit angezeigt als dem anderen. Bis sich die Besatzung in diesem Moment den nötigen Überblick verschafft hat, um zu entscheiden, welchen Datenquellen man vertrauen kann und welche aus dem System genommen werden müssen, können wertvolle Minuten vergehen. [15]
Auswirkungen von Fehlfunktionen
Die Auswirkungen solcher Fehlfunktionen können bei Flugzeugen mit automatischen Schutzfunktionen wie dem Airbus besonders gravierend sein. Mittlerweile ist jedoch jedes moderne Verkehrsflugzeug mit Computern ausgestattet und abhängig von Sensordaten, weshalb Fehlverhalten derselben auch hier hochkomplexe Situationen entstehen lassen können.[16]
In den letzten Jahren hat sich der Fokus für Flugzeugführer weg vom ständigen, manuellen Fliegen der Flugzeuge hin zum Überwachen der Systeme und des Autopiloten bewegt. Das Fliegen von Hand beschränkt sich heutzutage meist nur noch auf die ersten Minuten nach dem Start und die letzten Minuten vor der Landung. In diesem Zusammenhang wurde festgestellt, dass die Flugfertigkeiten der Piloten in den letzten Jahren nachgelassen haben. Dies wird zum einen auf den erhöhten Automatisierungsgrad zurückgeführt. Zum anderen spielt aber auch die Art des Flugbetriebs, also Kurz- oder Langstreckenoperation eine große Rolle. Um diesem Trend entgegenzuwirken, fördern einige Fluggesellschaften das manuelle Fliegen und erlauben ihren Piloten, bei entsprechenden Rahmenbedingungen Sichtanflüge durchzuführen. [17]
Beispiel für einen Zwischenfall
Im Steigflug aus Bilbao heraus entdeckte die Crew eines Airbus A321, dass sich die angezeigten Mindestgeschwindigkeiten auf ihren Displays merkwürdig verhalten. Nachdem Ausschalten der Automatik verhielt sich das Flugzeug nicht wie gewohnt, und es war ein konstanter Ausschlag nach oben nötig, um den zwischenzeitlichen Sinkflug zu beenden. Im Anschluss an einige Systemneustarts und einer Auswertung der automatischen Fehlerübermittlung durch Mechaniker in Frankfurt schaltete man schließlich den ADR2 aus. Dieser Computer verwertet flugzeugeigene Positionsdaten sowie alle Druckdaten und Anstellwinkelinformationen und errechnet die Fluglage und bestimmte Geschwindigkeiten. Dieser Eingriff normalisierte den Flugzustand und machte auch das Einschalten des Autopiloten wieder möglich, der vorher noch blockiert war, da das Flugzeug aus Sicht der Systeme mit einem zu hohen Anstellwinkel unterwegs war.
Ursache des Unfalls
Als Ursache wurde letzten Endes vereiste Anstellwinkelmesser festgestellt. Diese froren auf einem für den Steigflug normalen Wert von 4,2° bzw. 4,6° fest. Mit der größeren Höhe und der damit niedrigeren Luftdichte sind diese Werte jedoch zu hoch. Außerdem lassen sie die Computer annehmen, dass sich das Flugzeug zu langsam fortbewegt. Als Gegenmaßnahme steuert das System das Flugzeug in einen Sinkflug. Allerdings lässt der sich nur durch konstantes Gegensteuern der Piloten stoppen.
Der Airbus verfügt über drei Messeinheiten für den Anstellwinkel. Im Normalfall verwendet der Pilot die Werte von System 1 und 2, sofern keiner der Werte zu stark vom Mittel aller drei Anstellwinkel abweicht. In diesem Fall waren Sensor 1 und 2 in ähnlichen Stellungen eingefroren. Und das hat dazu geführt, dass die Daten von Sensor 3 komplett ignoriert wurden. Denn die Logik sieht vor, zwei gleichen Werten Priorität zu geben. Nachdem Ausschalten von ADR2 fiel das Flugzeug in den Basisflugmodus „Alternate Law“ zurück, in dem die komplexen Schutzmechanismen nicht mehr verfügbar sind. Erst dies ermöglichte es den Piloten wieder, die volle Kontrolle über das Flugzeug zu erlangen und den Flug sicher fortzusetzen. [18]
Hinweis: Diesen Text erstellte Sascha Müller, Studierender im Studiengang Aviation Business an der htw saar.
Literaturverzeichnis zur Automatisierung im Airbus
Printquellen
Edelweiss Operation Manual A (OM A) (2017), Revision 37 (01.09.2017).
Edelweiss Airbus A320 Flight Crew Operating Manual (FCOM), (14.09.2017).
Haslbeck A. u.a. (2014), A flight simulator study to evaluate manual flying skills of airline pilots.
Oxford Aviation Academy (2011), Principles of Flight, Shoreham: Transair.
Penner H. und Plath D. (1989), Airbus international, 4. Auflage, Stuttgart: Motorbuch Verlag.
Internetquellen zur Automatisierung
Airbus Geschichtsverzeichnis 1980er Jahre, http://company.airbus.com/company/heritage/heritage-timeline/1980.html.
Bulletin Unfälle und Störungen beim Betrieb ziviler Luftfahrzeuge 11/17, https://www.bfu-web.de/DE/Publikationen/Bulletins/2014/Bulletin2014-11.pdf?__blob=publicationFile.
Flugunfallbericht Air France Flug 447 in deutscher Sprache, https://www.bea.aero/enquetes/vol.af.447/note05juillet2012.de.pdf.
Zusammenfassung der Bruchlandung einer Boeing 737 in Amsterdam, http://www.avherald.com/h?article=41595ec3/0071&opt=1.
Fußnoten zur Automatisierung im Airbus
[1] vgl. Airbus Online Geschichtsverzeichnis
[2] vgl. Penner/Plath (1989), S.36.
[3] vgl. Penner/Plath (1989), S. 155.
[4] vgl. Edelweiss FCOM (2017), DSC-27-10-10, S. 1/6ff.
[5] Oxford Aviation Academy, POF (2011) S. 351.
[6] vgl. Oxford Aviation Academy, POF (2011) S. 353
[7] vgl. Edelweiss FCOM A320 (2017), DSC-27-20-10-20, S. 1/10.
[8] vgl. Edelweiss FCOM A320 (2017), DSC-27-20-20, S. 7/10.
[9] vgl. Edelweiss FCOM A320 (2017), DSC-22_10-50-20 S. 2/2.
[10] Oxford Aviation Academy, POF (2011) S. 52
[11] vgl. Edelweiss FCOM A320 (2017), DSC-22_10-50-40 S. 1/2f.
[12] vgl. Edelweiss FCOM A320 (2017), DSC-22_40-30 S.2/4f.
[13] vgl. Edelweiss FCOM A320 (2017), DSC-27-20-10-20, S. 8/10ff.
[14] vgl. Edelweiss OM A (2017), S. 368ff.
[15] vgl. BEA Untersuchungsbericht AF447, S. 3/6ff.
[16] vgl. Turkish Airlines Unfallbericht
[17] vgl. Haslbeck A. (2014), A flight simulator study to evaluate manual flying skills of airline pilots
[18] vgl. BFU (2017), BFU Bulletin 11/17, S. 22ff.